Display local 3D point cloud data.
Use case
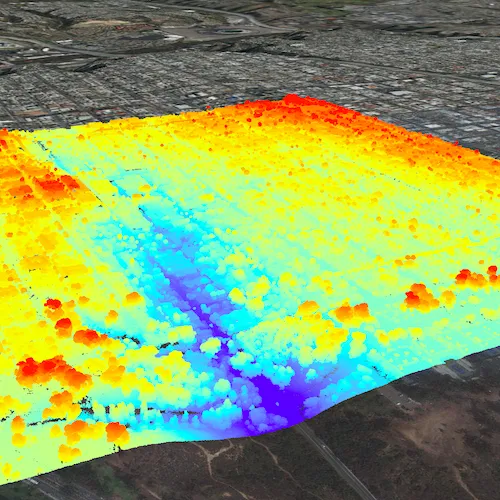
Point clouds are often used to visualize massive sets of sensor data such as lidar. The point locations indicate where the sensor data was measured spatially, and the color or size of the points indicate the measured/derived value of the sensor reading. In the case of lidar, the color of the visualized point could be the color of the reflected light, so that the point cloud forms a true color 3D image of the area.
Point clouds can be loaded offline from scene layer packages (.slpk).
How to use the sample
The sample starts with a point cloud layer loaded and draped on top of a scene. Pan and zoom to explore the scene and see the detail of the point cloud layer.
How it works
- Create a
PointCloudLayerwith the path to a local.slpkfile containing a point cloud layer. - Add the layer to a scene’s operational layers collection.
Relevant API
- PointCloudLayer
About the data
This point cloud data comes from Balboa Park in San Diego, California. Created and provided by USGS.
Offline data
Read more about how to set up the sample’s offline data here.
| Link | Local Location |
|---|---|
| San Diego Point Cloud SLPK | <userhome>/ArcGIS/Runtime/Data/slpk/sandiego-north-balboa-pointcloud.slpk |
Tags
3D, point cloud, lidar
Sample code
// [WriteFile Name=ViewPointCloudDataOffline, Category=Scenes]// [Legal]// Copyright 2018 Esri.//// Licensed under the Apache License, Version 2.0 (the "License");// you may not use this file except in compliance with the License.// You may obtain a copy of the License at// http://www.apache.org/licenses/LICENSE-2.0//// Unless required by applicable law or agreed to in writing, software// distributed under the License is distributed on an "AS IS" BASIS,// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.// See the License for the specific language governing permissions and// limitations under the License.// [Legal]
#ifdef PCH_BUILD#include "pch.hpp"#endif // PCH_BUILD
// sample headers#include "ViewPointCloudDataOffline.h"
// ArcGIS Maps SDK headers#include "ArcGISTiledElevationSource.h"#include "ElevationSourceListModel.h"#include "Envelope.h"#include "Error.h"#include "LayerListModel.h"#include "MapTypes.h"#include "PointCloudLayer.h"#include "Scene.h"#include "SceneQuickView.h"#include "Surface.h"#include "Viewpoint.h"
// Qt headers#include <QFuture>#include <QStandardPaths>#include <QtCore/qglobal.h>
using namespace Esri::ArcGISRuntime;
ViewPointCloudDataOffline::ViewPointCloudDataOffline(QObject* parent /* = nullptr */) : QObject(parent), m_scene(new Scene(BasemapStyle::ArcGISImageryStandard, this)){ // create a new elevation source from Terrain3D service ArcGISTiledElevationSource* elevationSource = new ArcGISTiledElevationSource(QUrl("https://elevation3d.arcgis.com/arcgis/rest/services/WorldElevation3D/Terrain3D/ImageServer"), this);
// add the elevation source to the scene to display elevation m_scene->baseSurface()->elevationSources()->append(elevationSource);}
ViewPointCloudDataOffline::~ViewPointCloudDataOffline() = default;
void ViewPointCloudDataOffline::init(){ // Register classes for QML qmlRegisterType<SceneQuickView>("Esri.Samples", 1, 0, "SceneView"); qmlRegisterType<ViewPointCloudDataOffline>("Esri.Samples", 1, 0, "ViewPointCloudDataOfflineSample");}
SceneQuickView* ViewPointCloudDataOffline::sceneView() const{ return m_sceneView;}
// helper method to get cross platform data pathnamespace{ QString defaultDataPath() { QString dataPath;
#ifdef Q_OS_IOS dataPath = QStandardPaths::writableLocation(QStandardPaths::DocumentsLocation);#else dataPath = QStandardPaths::writableLocation(QStandardPaths::HomeLocation);#endif
return dataPath; }} // namespace
// Set the view (created in QML)void ViewPointCloudDataOffline::setSceneView(SceneQuickView* sceneView){ if (!sceneView || sceneView == m_sceneView) { return; }
m_sceneView = sceneView; m_sceneView->setArcGISScene(m_scene);
// create the point cloud layer const QUrl pointCloudLyrUrl(defaultDataPath() + "/ArcGIS/Runtime/Data/slpk/sandiego-north-balboa-pointcloud.slpk"); PointCloudLayer* pointCloudLyr = new PointCloudLayer(pointCloudLyrUrl, this);
// zoom to layer once loaded connect(pointCloudLyr, &PointCloudLayer::doneLoading, this, [this, pointCloudLyr](const Error& e) { if (!e.isEmpty()) { return; }
m_sceneView->setViewpointAsync(Viewpoint(pointCloudLyr->fullExtent())); });
// add the layer to the scene m_scene->operationalLayers()->append(pointCloudLyr);
emit sceneViewChanged();}// [WriteFile Name=ViewPointCloudDataOffline, Category=Scenes]// [Legal]// Copyright 2018 Esri.//// Licensed under the Apache License, Version 2.0 (the "License");// you may not use this file except in compliance with the License.// You may obtain a copy of the License at// http://www.apache.org/licenses/LICENSE-2.0//// Unless required by applicable law or agreed to in writing, software// distributed under the License is distributed on an "AS IS" BASIS,// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.// See the License for the specific language governing permissions and// limitations under the License.// [Legal]
#ifndef VIEWPOINTCLOUDDATAOFFLINE_H#define VIEWPOINTCLOUDDATAOFFLINE_H
// Qt headers#include <QObject>
namespace Esri::ArcGISRuntime{ class Scene; class SceneQuickView;} // namespace Esri::ArcGISRuntime
Q_MOC_INCLUDE("SceneQuickView.h")
class ViewPointCloudDataOffline : public QObject{ Q_OBJECT
Q_PROPERTY(Esri::ArcGISRuntime::SceneQuickView* sceneView READ sceneView WRITE setSceneView NOTIFY sceneViewChanged)
public: explicit ViewPointCloudDataOffline(QObject* parent = nullptr); ~ViewPointCloudDataOffline() override;
static void init();
signals: void sceneViewChanged();
private: Esri::ArcGISRuntime::SceneQuickView* sceneView() const; void setSceneView(Esri::ArcGISRuntime::SceneQuickView* sceneView);
Esri::ArcGISRuntime::Scene* m_scene = nullptr; Esri::ArcGISRuntime::SceneQuickView* m_sceneView = nullptr;};
#endif // VIEWPOINTCLOUDDATAOFFLINE_H// [WriteFile Name=ViewPointCloudDataOffline, Category=Scenes]// [Legal]// Copyright 2018 Esri.//// Licensed under the Apache License, Version 2.0 (the "License");// you may not use this file except in compliance with the License.// You may obtain a copy of the License at// http://www.apache.org/licenses/LICENSE-2.0//// Unless required by applicable law or agreed to in writing, software// distributed under the License is distributed on an "AS IS" BASIS,// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.// See the License for the specific language governing permissions and// limitations under the License.// [Legal]
import QtQuickimport QtQuick.Controlsimport Esri.Samples
Item {
SceneView { id: view anchors.fill: parent
Component.onCompleted: { // Set the focus on SceneView to initially enable keyboard navigation forceActiveFocus(); } }
// Declare the C++ instance which creates the scene etc. and supply the view ViewPointCloudDataOfflineSample { id: model sceneView: view }}